
.){kind=link}
自動化システムを扱うドイツの Festo 社は、動物や昆虫の研究で有名です。 すでに、カンガルー、ゾウの鼻、アリなどの作品を誇っています。 先日IEEE Spectrum誌が報じたように、同社はスターウォーズのドロイデックに似たローリングスパイダーロボットを発表し、 オオコウモリ (家族 コウモリ、家族 有翼の).
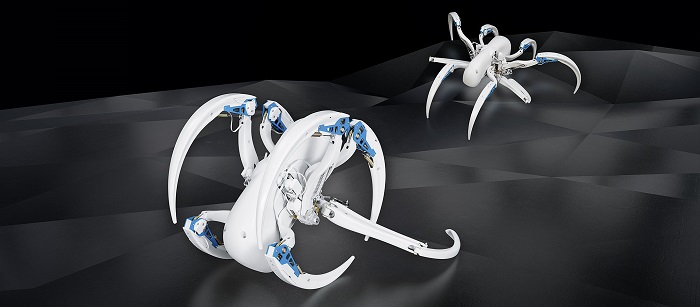
最初は、転がるクモのアイデアが最善ではないように見えるかもしれませんが、モロッコに生息するCebrennus rechenbergiと呼ばれる実際のクモのプロトタイプに基づいています. この種のクモを発見した Ingo Rechenberg 教授は、個人的にロボットの開発に参加しました。




クモには 15 本の脚があり、脚と体の曲がり部分にある 個のミニモーターによって制御されます。 ロボットが転がると、円を描く 本の脚が回転し、残りの 本で押し出されます。 ノベルティも装備 慣性航法、おかげで、ロボットは自分がどこにいて、転がっているときにいつ押し出すかを理解します。
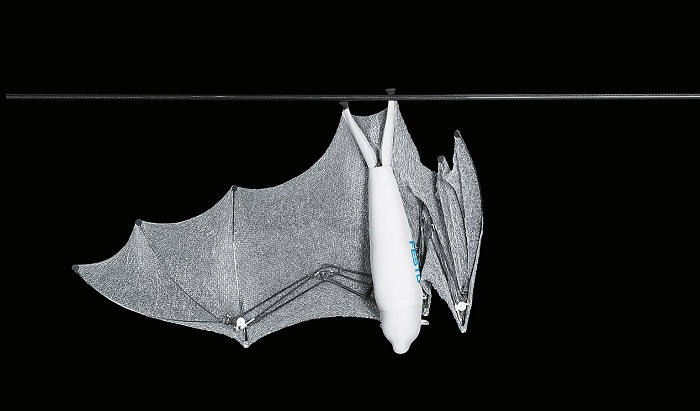
クモに加えて、Festo はバイオニック フライング フォックスを発表しました。 開発者は、ロボットの翼を実装するために多くの時間を費やさなければなりませんでした。 「翼に使われているメンブレンは非常に薄くて軽い。 45000枚の気密フィルムと編まれたエラスタン生地で構成され、点で接続されています。 伸縮性があるので、羽をたたんでもほとんどすり減りません。 メンブレンの素材が亀裂の形成を防ぎます - これにより、メンブレンがわずかに損傷したとしても、オオコウモリは飛行を続けることができます」 - Festo 社の開発者に通知します。 また、飛行中のオブジェクトの位置を記録するモーション トラッキング システムのおかげで、オオコウモリは特定の空間で半自律的に移動できます。



ボストン ダイナミクスの SpotMini のように、これらのロボットが作成されたのには理由があります。 彼らの目的は、手の届きにくい場所に入り、さまざまな風景を横断し、救助活動を行うことです。
出典: theverge.com