

{kind=link}
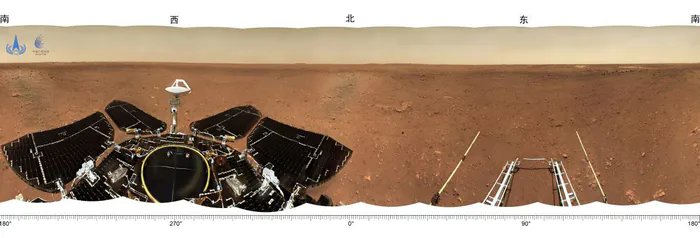
Китайське національне космічне управління опублікувало зображення, зроблені ровером Zhurong, в тому числі панорамний вид на місце посадки і рельєф Марса. Панорама місця посадки була зроблена навігаційною камерою місцевості на щоглі ровера, коли він ще перебував на посадочній платформі, і була скоригована і зібрана разом у вигляді петлі на 360°. На панорамі видно рівнинний рельєф біля місця посадки, а подалі видно марсіанський горизонт.

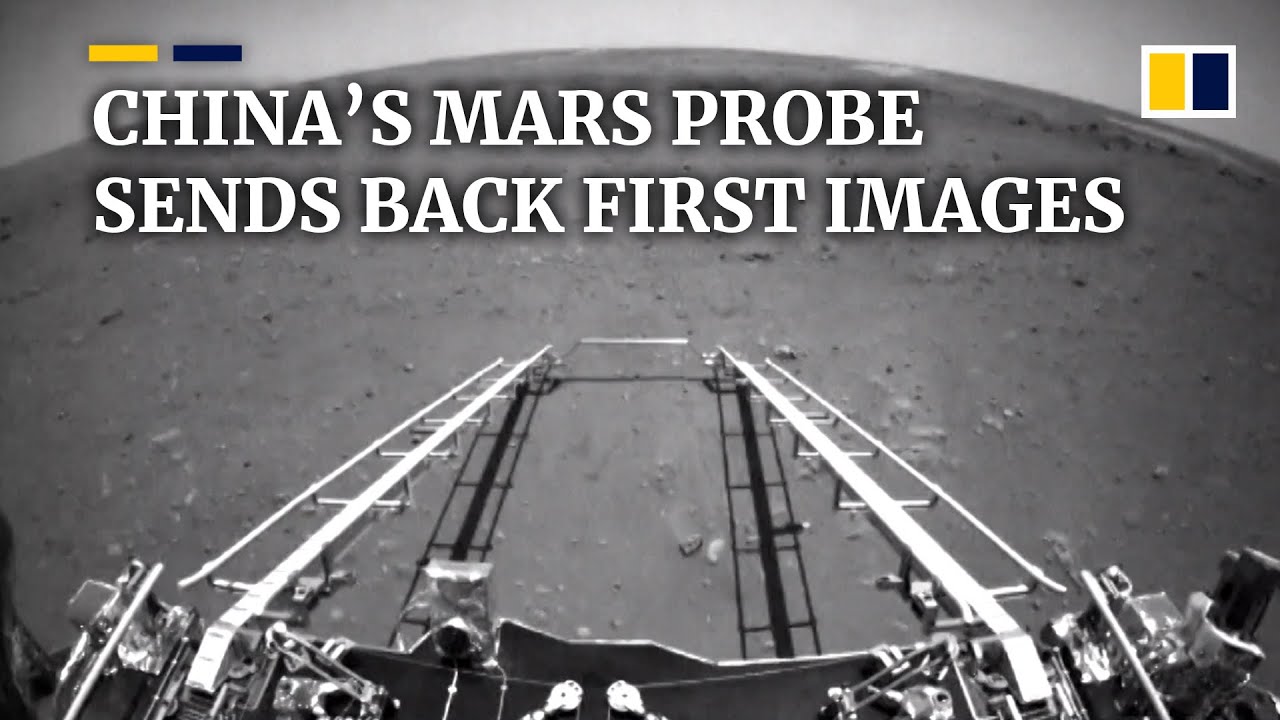
Карта топографії Марса – це перше зображення місцевості, зроблене навігаційною топографічною камерою після того, як ровер досяг поверхні Марса. Карта показує плоску поверхню з камінням різного розміру в безпосередній близькості. Далі є кратер кільцевої форми з темнішим камінням по краях. Зображення також включають фото посадкового майданчика China Footprint, зроблене ровером приблизно в 6 м на схід від посадкового майданчика.
Космічний апарат Tianwen 1 був успішно запущений 23 липня 2020 року в місті Веньчан на півдні Китаю, провінція Хайнань. Станом на 11 червня орбітальний апарат в хорошому стані працює на ретрансляційній орбіті, а ровер Zhurong пропрацював на поверхні 28 марсіанських днів.
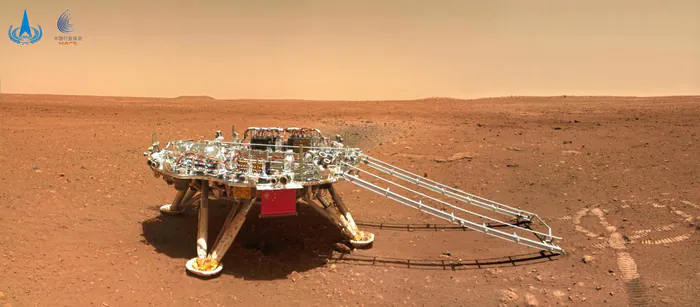
Щоб зробити перший кадр ровер розмістив дистанційну камеру на віддаленні від посадкової платформи і повернувся в кадр. А на панорамі видно місце падіння парашута і теплового щита.
Zhurong вивчатиме геологію своєї зони приземлення і полювати за водяним льодом, серед іншого, під час наземної місії, розрахованої як мінімум на три місяці. Тим часом орбітальний апарат Tianwen-1 буде проводити мінералогічні та інші дослідження як мінімум протягом одного марсіанського року, що становить 687 земних днів. Китай має амбітні космічні плани, які включають запуск орбітальної станції з екіпажем і висадку людини на Місяць.
Читайте також:
- У Китаї випробовують іонні двигуни для польотів на Марс і далі
- Китай став третьою країною, що посадила апарат на Марс, а на Місяці от-от прокинеться їх ровер