

Роботи – ідеальні кандидати для освоєння космосу: вони можуть переносити екстремальні умови, постійно повторюючи одні й ті самі завдання без втоми. Як і роботи Землі, вони можуть виконувати небезпечну і рутинну роботу – від виходу у відкритий космос до полірування поверхні космічного корабля. Оскільки космічні місії стають дедалі більшими і розширюються в наукових масштабах, вимагаючи все більше обладнання, виникає потреба в легкому роботизованому маніпуляторі, здатному працювати в складних для людини умовах.
Проте схеми управління, які дозволяють їм працювати на Землі, де місце дії плоске, не пристосовані до роботи у космосі, де середовище непередбачуване і мінливе. Для розв’язання цієї проблеми дослідники зі Школи машинобудування та автоматизації Технологічного інституту Харбін розробили роботизовану руку вагою 9,23 кг, здатну переносити майже чверть власної ваги, з можливістю регулювати своє становище та швидкість у режимі реального часу залежно від навколишнього середовища.
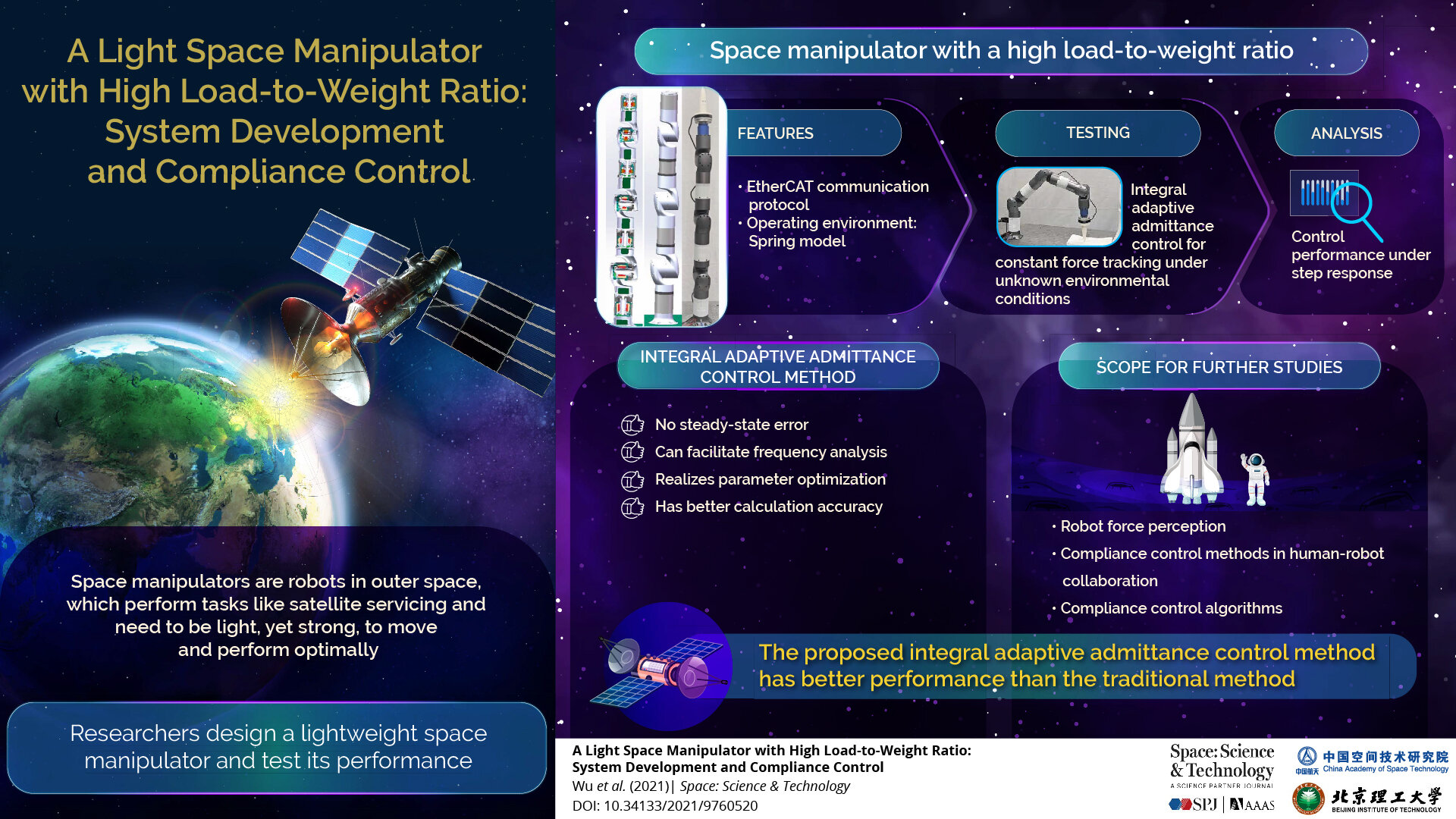
«Для управління постійною силою на площині напрямок керуючої сили постійний, але для викривленої поверхні в невідомому середовищі її нормальний вектор часто змінюється в реальному часі, тому традиційний метод не спрацює», – кажуть фахівці. «Щоб подолати ці труднощі, ми пропонуємо інтегральне адаптивне управління адмітансом, яке може реалізувати корекцію бажаного положення руки маніпулятора в реальному часі так, щоб вона перебувала у повному контакті та здійснювала постійне керування силою». Як приклад, коли папір лежить на пласкому робочому столі, набагато легше підтримувати рівномірний тиск по всій лінії. Намалювати таку ж лінію на аркуші паперу, обгорнутому навколо стрибаючої кульки, набагато складніше, і це вимагає спеціальних розрахунків, щоб зрозуміти рух кульки і те, який тиск потрібно чинити залежно від положення ручки та кульки.
Для підтримки постійного контролю сили космічного маніпулятора дослідники застосували метод управління, який усуває необхідність корекції стану – ключового компонента систем управління у відомих середовищах. Дослідники протестували свій метод управління для легкого маніпулятора та виявили, що навіть на незнайомій поверхні механічна рука може коригувати положення швидше, ніж маніпулятор із традиційним управлінням, внаслідок чого ефект відстеження досить стійкий для практичного застосування.
«Використання запропонованого легкого космічного маніпулятора та інтегрального адаптивного методу управління коефіцієнтом передачі може вирішити практичні завдання з обслуговування на орбіті», – кажуть вчені. Ця робота може бути зразком для проєктування легких маніпуляторів у майбутньому, а підхід до управління може бути застосований до процесу обробки роботизованих шліфувальних та полірувальних машин.
Читайте також:


Leave a Reply